Rugged 是一种传感器到地形映射工具,它在其视线计算中考虑了数字高程模型(DEM)。它是一个免费的中级库,用 Java 编写并作为 Orekit 的附加组件实现。

它主要提供直接和反向定位,即它允许准确计算从航天器仪器中的特定像素看向哪个地面点,反之亦然,哪个像素将看到指定的地面点。这种地面和传感器之间的映射是通过考虑地面数字高程模型、地球旋转及其所有微小的不规则性、机载传感器像素的各自视线、航天器运动和姿态以及几种物理效应来计算的。
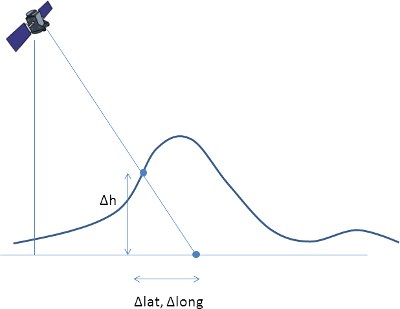 考虑 DEM 在纬度、经度和高度计算中的影响
考虑 DEM 在纬度、经度和高度计算中的影响
直接和反向定位可用于执行图像的全正射校正和观测相同区域的传感器之间的相关性。
直接/反向定位
细化
可以支持多种类型的数字高程模型,包括用户提供的模型
可用的几种交点模型算法
可以自行传播轨道进行初步任务分析或数据生成
可以自行传播姿态进行初步任务分析或数据生成
非常 快速
地球旋转的现代和传统模型
应用完整的校正集以获得更高的精度
不限于地球
高度便携(Linux、Windows、MacOSX、...)
支持多种语言
Rugged 在源代码和二进制格式中都可以免费获取,并附带所有相关文档和测试。
它是根据Apache License Version 2.0 分发的。这是一个众所周知的商业友好许可证。这意味着任何人都可以使用它来构建任何应用程序,无论是免费还是付费。对于你自己的代码没有任何附加条件。
鼓励每个人将Rugged用作改进空间系统互操作性的通用中间层。
Rugged自2014年以来一直在CS GROUP 内开发,并且仍由其双重团队的空间动力学和图像处理专家使用和维护。
Rugged用于欧洲空间局(ESA)Sentinel 2任务的图像处理,以及在ESA操作任务科学利用(SEOM)框架中,用于计算Sentinel 2产品的地形阴影蒙版。
Rugged已用于验证空中客车国防和航天公司(ADS)的地理定位库。
Rugged还被法国国家航天局(CNES)用作VHR推扫传感器(Pleiades)的精化研究的研究库。
Rugged在CS GROUP内用于研究目的。